PUBLIC DEVELOPMENT LOG
Gerçek donanım hedefli aarch64 microkernel geliştirme günlüğü.
ASELSAN Milli Telefon vizyonu için sıfırdan, Android'siz, capability-based Rust microkernel geliştirme süreci.
M0M1M2M3M4M5M6M7M8 aktif
M1-M7
tamamlandı
M8
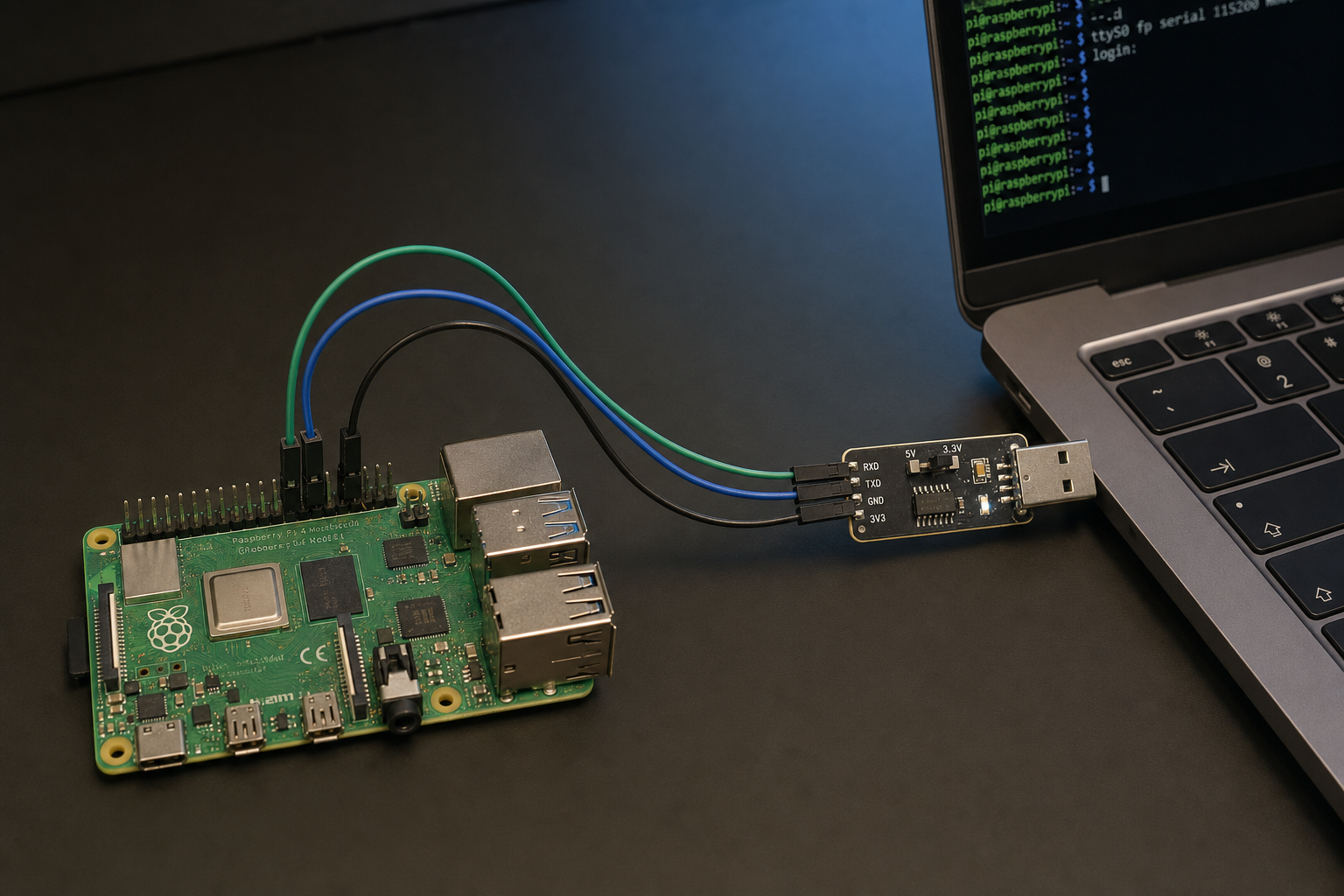
RPi4 bring-up
UART
ilk log hedefi
Şu an üzerinde çalışılan - M8
Real Hardware Bring-up (Raspberry Pi 4)
QEMU aşamasından gerçek donanıma geçiş başladı. BCM2711 için PL011 UART sürücüsü ve VideoCore Mailbox protokolü entegre edildi. Erken boot aşamasında gerçek UART üzerinden log alınıyor.
Misyon
Güvenilir bir microkernel ile 6G Secure Phone için sağlam temel oluşturmak.
ASELSAN + Türk Telekom 6G uyumlu güvenli telefon vizyonu için capability tabanlı microkernel geliştiriyoruz. Gerçek donanımda (RPi 4 / telefon SoC) çalışacak, formal verification'a yakın, çok küçük TCB'li bir sistem hedefleniyor.
Gerçek Donanım Hedefi (M8+)
- ARM Trusted Firmware + EL2 to EL1 geçiş
- Device Tree parsing
- PSCI client + secondary CPU
- Temel GPIO + SD + NPU driver iskeleti
QEMU şu an sadece geliştirme ortamı.